LOS ORIGENES DE LOS ROBOTS
El término «robot» fue acuñado por el dramaturgo checo Karel Capek en 1921 en su obra universal Robots de Rossom. La palabra «robot» viene de la palabra checa robota que significa el trabajo forzoso. Desde entonces, los robots se han desarrollado a partir de primitivas máquinas que podían realizar una variedad de tareas serviles al día de hoy en el que puedan realizar tareas muy complejas. Los robots son utilizados en las computadoras, en la investigación y en la industria manufacturera. Los robots han entrado recientemente en la medicina. Los robots industriales se utilizan ahora para una variedad de técnicas quirúrgicas, son aprobados por la FDA, y se comercializan.
ROBOTS EN MEDICINA
Los robots se introdujeron por primera vez en 1987 con la primera cirugía laparoscópica, una colecistectomía. Desde entonces, numerosos procedimientos se han realizado por vía laparoscópica como la tecnología y las habilidades que los cirujanos han desarrollado. Esta cirugía se conoce como mínimamente invasiva. Ya que las incisiones son más pequeñas, hay menos riesgo de infección, las estancias hospitalarias son más cortos, y la recuperación se reduce. Sin embargo, también hay desventajas de la cirugía mínimamente invasiva. El equipo requiere un cirujano para mover los instrumentos mientras observa un monitor de video. El cirujano debe moverse en la dirección opuesta a la meta en el monitor para interactuar con el área correcta en el paciente para la coordinación mano-ojo, táctil y retroalimentación de fuerza y destreza no se vean comprometidos. Otros inconvenientes de la cirugía laparoscópica incluyen títulos restringidos de movimiento, disminución del sentido del tacto, el aumento de la sensibilidad al movimiento de la mano.
El primer robot no laparoscópico fue el Puma 560,  usado por Kwoh et al, para realizar biopsias de cerebro con mayor precisión en 1985. Tres años más tarde, Davies et al, realizaron una resección transuretral utilizando la misma máquina. Este sistema desarrollado en el PROBOT,
usado por Kwoh et al, para realizar biopsias de cerebro con mayor precisión en 1985. Tres años más tarde, Davies et al, realizaron una resección transuretral utilizando la misma máquina. Este sistema desarrollado en el PROBOT,
 un sistema robótico diseñado específicamente para la resección transuretral de la próstata. A continuación, ROBODOC fue desarrollado por integreated Suministros quirúrgicos de Sacramento, CA que fue diseñado para mover el fémur durante cirugías de reemplazo de cadera.
un sistema robótico diseñado específicamente para la resección transuretral de la próstata. A continuación, ROBODOC fue desarrollado por integreated Suministros quirúrgicos de Sacramento, CA que fue diseñado para mover el fémur durante cirugías de reemplazo de cadera.
 Este se convirtió en el primer robot aprobado por la FDA.
Este se convirtió en el primer robot aprobado por la FDA.
PARTICIPACION DE LA NASA Y DEL EJERCITO DE LOS EE.UU.
A fines de los años ochenta, los investigadores de la NASA (Administración Nacional del Aire y del Espacio) y el Centro de Investigación Ames comenzaron a trabajar en un concepto llamado telecirugía, que combina la realidad virtual, robots, y la medicina. A principios de 1990, los científicos del equipo de la NASA-Ames se unieron al Instituto de Investigación de Stanford (SRA) para desarrollar un telemanipulador para cirugía de la mano. Con el tiempo, los cirujanos y endoscopistas se unieron al equipo de desarrollo para dar a su proyecto de una amplia gama de expertos. El Ejército de Estados Unidos también se interesó en este concepto debido a la gran mortalidad de los soldados en el traslado desde el campo de batalla hasta el hospital. El sistema que fue desarrollado para el ejército se conoce como MASH (Hospital Quirúrgico Móvil Avanzado) donde un soldado podría ser cargado en un vehículo con equipo quirúrgico robótico y podría ser operado por un cirujano en la unidad móvil. Aún no ha sido probada ni aprobada para el ejército.
VISION GENERAL DEL DESARROLLO DE SISTEMAS ROBOTICOS POR EMPRESAS
Una variedad de empresas comerciales se han desarrollado para crear sistemas robóticos quirúrgicos para la comunidad en general.
Computer Motion, Inc. desarrolló el AESOP® endoscopio Posicionador: un sistema robótico activado por voz para la cirugía endoscópica.
 En 1993, este se convirtió en el primer robot aprobado por la FDA para la cirugía.
En 1993, este se convirtió en el primer robot aprobado por la FDA para la cirugía.
El Centro de Control HERMES® también fue desarrollado por Computer Motion, Inc. y trajo un comando de voz centralizado y un sistema de reconocimiento a los dispositivos médicos robóticos.
Integrated Surgical Systems (ahora Intuitive Surgical, Inc.) rediseñaron el sistema de cirugía de telepresencia Verde SRI y crearon el System® quirúrgico da Vinci clasificado como un sistema quirúrgico maestro-esclavo. Utiliza verdadera visualización en 3-D y EndoWrist. Fue aprobado por la FDA en julio de 2000 para la cirugía laparoscópica en general. En noviembre de 2002 se efectuó la primer cirugía, la reparación de una válvula mitral, y desde entonces también se encuentra participando en los Estados Unidos, en estudio clínico para la cirugía coronaria totalmente endoscópica de revascularización. Actualmente hay más de 3400 sistemas de Da Vinci en uso en el mundo.
Fue aprobado por la FDA en julio de 2000 para la cirugía laparoscópica en general. En noviembre de 2002 se efectuó la primer cirugía, la reparación de una válvula mitral, y desde entonces también se encuentra participando en los Estados Unidos, en estudio clínico para la cirugía coronaria totalmente endoscópica de revascularización. Actualmente hay más de 3400 sistemas de Da Vinci en uso en el mundo.
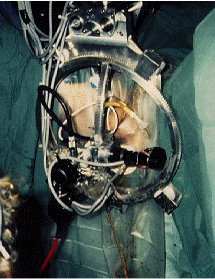
En 2001, SOCRATES ™, Sistema de telecolaboración Robótica fue creado por Computer Motion, Inc. Incluye equipos de telecomunicaciones integrado junto con los dispositivos robóticos para proporcionar telecolaboración remoto quirúrgica. Este sistema se utilizó para efectuar por primera vez, una telecirugía transatlántica. Computer Motion se fusionó con Intuitive Surgical, Inc., en junio de 2003. Introdujeron el Sistema quirúrgico Zeus® en 1998.
Incluye equipos de telecomunicaciones integrado junto con los dispositivos robóticos para proporcionar telecolaboración remoto quirúrgica. Este sistema se utilizó para efectuar por primera vez, una telecirugía transatlántica. Computer Motion se fusionó con Intuitive Surgical, Inc., en junio de 2003. Introdujeron el Sistema quirúrgico Zeus® en 1998. 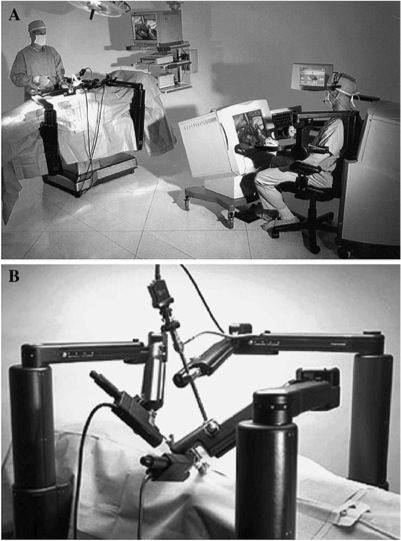 Este sistema consiste en un centro de control de cirujano y tres brazos robóticos de mesa montada para la cirugía endoscópica. Zeus era el sistema utilizado para realizar la primera cirugía robótica totalmente endoscópica con en el corazón latiendo, el procedimiento fue un bypass coronario totalmente endoscópica.
Este sistema consiste en un centro de control de cirujano y tres brazos robóticos de mesa montada para la cirugía endoscópica. Zeus era el sistema utilizado para realizar la primera cirugía robótica totalmente endoscópica con en el corazón latiendo, el procedimiento fue un bypass coronario totalmente endoscópica.
Muchos más robots, instrumentos y programas del robóticos están siendo investigados y desarrollados en los Estados Unidos y alrededor del mundo. Con un mercado competitivo de la salud en los Estados Unidos, que tiene equipos de última generación, las nuevas tecnologías, así como las modalidades de pruebas más nuevas son importantes para el éxito de la organización. Robótica en la medicina es un nuevo, auque avanzado campo todavía en desarrollo.